#include <Camera.h>
| VolViz::Private_::CameraClient::CameraClient |
( |
Camera const & |
cam | ) |
|
|
inlineprivate |
Projects a 3D point in world coordinates into the screen coordinate system
- Parameters
-
| position | position in 3D world space |
| ambientScale | the physical length of one unit in the target 3D |
- Returns
- projected position including depth
| Matrix4 VolViz::Private_::CameraClient::projectionMatrix |
( |
| ) |
const |
|
inlineprivatenoexcept |
Returns the camera's projection matrix.
| Position VolViz::Private_::CameraClient::unproject |
( |
Position2 const & |
screenPos, |
|
|
float |
depth, |
|
|
Length |
ambientScale |
|
) |
| const |
|
inlineprivatenoexcept |
Unprojectis a point in screen coordinates with known depth into the 3D scene
- Parameters
-
| screenPos | the source point in screen coordinate system, i.e. (-1, -1) is the bottom left, (1, 1) is the top right |
| depth | the depth of the pixel at screenPos |
| ambientScale | the physical length of one unit in the target 3D space |
| Matrix4 VolViz::Private_::CameraClient::viewMatrix |
( |
Length |
ambientScale | ) |
const |
|
inlineprivatenoexcept |
Returns the camera's view matrix, i.e. the inverse camera transform.
| Matrix4 VolViz::Private_::CameraClient::viewProjectionMatrix |
( |
Length |
ambientScale | ) |
const |
|
inlineprivatenoexcept |
| Camera const& VolViz::Private_::CameraClient::cam_ |
|
private |
The documentation for this class was generated from the following file:
- /home/travis/build/ithron/VolViz/include/VolViz/src/Camera.h


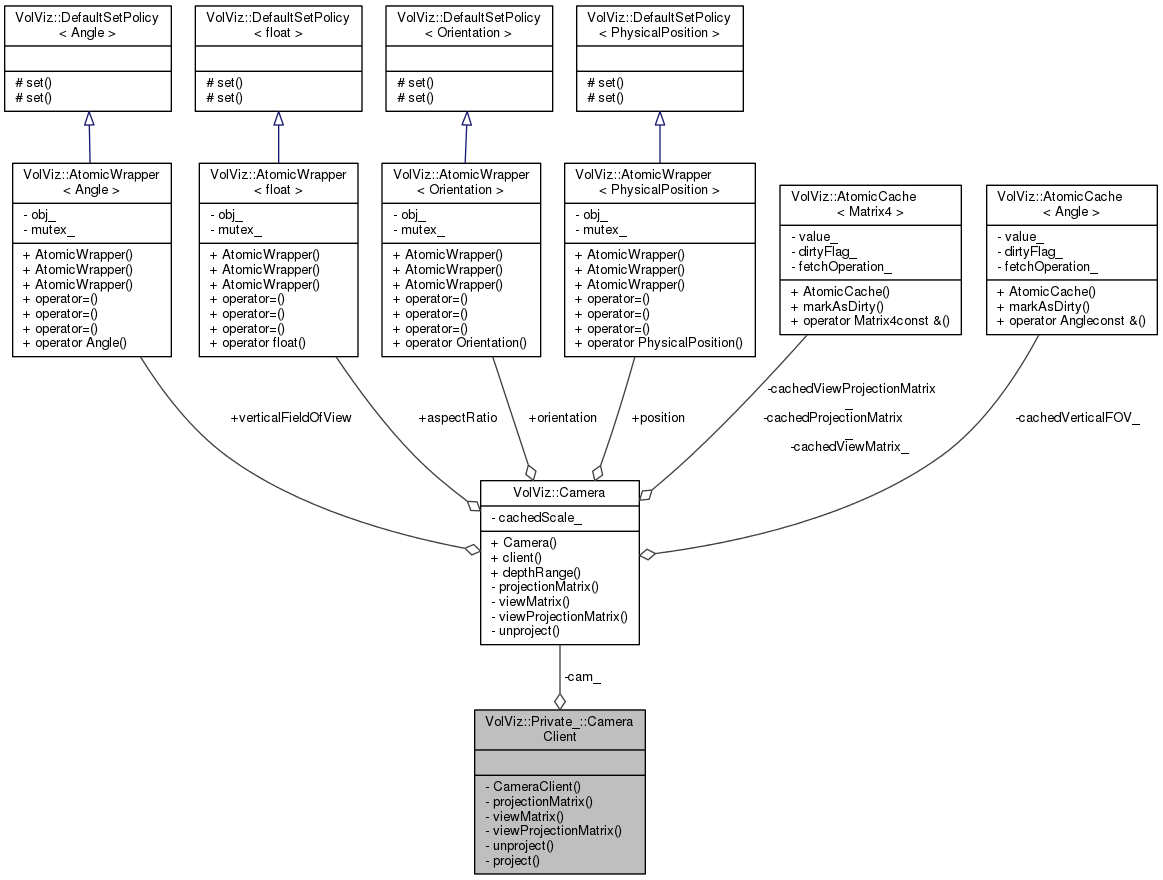
 Collaboration diagram for VolViz::Private_::CameraClient:
Collaboration diagram for VolViz::Private_::CameraClient: 1.8.6
1.8.6